- Published: Monday, 23 May 2022
Jevaroo’s neck is my favorite part of the robot.
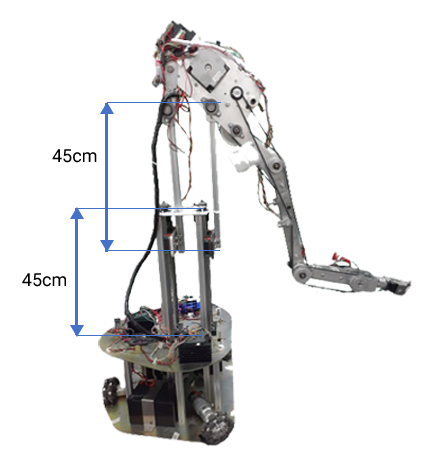
Jevaroo’s neck has a movement range of 25cm, allowing Jevaroo to reach for objects up to 170cm high while outstretched at full extension, and all the way down on the floor at no extension. It is able to do that due to the innovative double linear actuator design, which creates a levered effect.

When both linear actuators move at the same height and the same speed, the limb is able to travel up and down uniformly in order to hold for example, a container of liquid steadily at the same height without spillage. In fact, even when the linear actuators move in uniform in the same direction at different heights, the robot limb is able to maintain its end-effector position - Jevaroo would still be able to maintain its end-effector position as it moves around.
To change the angle of the limb, one linear actuator may be stationary, while the other is in motion, changing the tilt angle for the entire limb. To increase the speed of change for the end effector to get into its new position, both linear actuators may move in opposition directions.
The linear actuators are capable of great speeds and great forces, while being bottom-heavy, with the motors of the linear actuator at the base of the robot, increasing stability. The levered design is an inspired choice, increasing motion capability, increasing the robot’s upward force and adding stability against loads on the robot arm.
 Forbes named me a
Forbes named me a 

